
Introduction
Dans le cadre de mes études d’ingénieurs, j’avais à réaliser en groupe un projet de conception dont le sujet pouvait être choisis par les étudiants (sous réserve de présenter un cahier des charges cohérent). Nous avons choisit de réaliser un drone dont le cahier des charges est décrit ci-dessous:
- Le drone doit être en mesure de voler de manière horizontale.
- Le drone doit pouvoir transmettre un flux vidéo vers une plateforme web.
- Le drone doit fonctionner avec un code que nous avons nous même conçu, tournant sur une carte au choix : un 8051 ou un STM32.
- Comme le budget est serré, nous devions le réaliser à partir de matériaux de récupération, c’est à dire un AR DRONE 2 de la marque Parrot, ce qui complique la tache.
Mon rôle dans l’équipe était d’assurer le pilotage les moteurs de l’AR Drone à la vitesse souhaité via un STM32.
Le fruit de mes recherches est présenté dans une série de 3 articles:
– présentation du projet, recherche sur internet (cet article)
– reverse engineering du firmware du drone
– interactions avec les moteurs
Cet article est une étude préliminaire qui pour objectif d’obtenir quelques informations avant de passer aux choses sérieuses. C’est peut-être pas le point le plus intéressant de mon travail de recherche d’un point de vue technique, car je me contente de présentater des résultats issues de recherches sur internet, mais ça reste néanmoins nécessaire si on veut mener le reverse à bien afin d’avoir une vague idée du fonctionnement générale de notre système.
Analyse du matériel
Nous avions à notre disposition un drone Parrot AR DRONE 2 non fonctionnel gentiment fourni par les responsables de la majeur robotique.

La première étape a consisté à démonter les pièces du drone, afin d’en faire l’inventaire et de sélectionner les composants que l’on pourrait garder. Ils sont listé dans le tableau ci-dessous:
| 4 moteurs brushless avec contrôleur (avec 4 hélices) |
| 1 carte mère |
| 1 châssis de drone |
| 2 cameras |



Etude de la carte mère
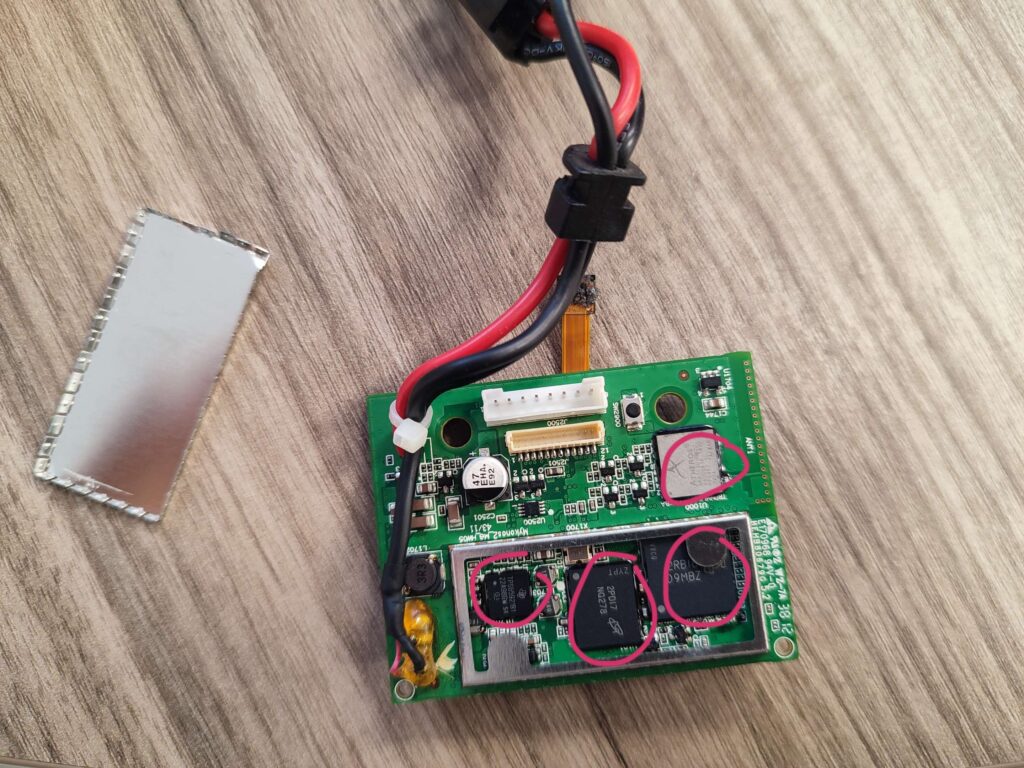
On distingue 4 composants notables:
– D9MBZ (documentation ici) LPDDR SRAM
– NQ278 (documentation ici) Mémoire NAND Flash
– TPS65921 (documentation ici) Power Management and USB Single Chip
– AR6103G-BM2D-R Module 802.11b/g/n 2.4GHz 72200Kbps LGA
L’objectif étant de développer notre propre logiciel de contrôle du drone, la carte mère ne nous intéressait pas. On a conservé le reste des composants.
Etude des moteurs
Présentation des moteurs
Les moteurs brushless de l’AR DRONE 2 sont les suivants:

Ils ont été spécialement conçus pour l’AR Drone pour garantir des performances élevées et une longue durée de vie. Ils ont une puissance de 15 Watts et effectuent 28,000 tours par minute (RPM) en vol stationnaire, ce qui correspond à 3,300 RPM sur les hélices. Les gammes de moteurs commencent à 10,350 RPM et vont jusqu’à 41,400 RPM. Des microcontrôleurs 8 bits basse puissance et des ADC 10 bits contrôlent la vitesse des moteurs.
Composants des moteurs
Les moteurs sont accompagné d’un contrôleur (un Atmel ATMega8a) dont le rôle est de réguler la vitesse de ce dernier.
Protocole de communication
Nous l’avons vite compris, le protocole de communication entre la carte mère et les moteurs est un protocole propriétaire Parrot non documenté, se transmettant par liaison UART avec un baudrate de 115200. Comme notre carcasse de drone ne fonctionnait pas, il nous était impossible de réaliser des captures des échanges entre la carte mère et les moteurs pour les analyser et comprendre le protocole. A ce moment là conserver les moteurs du drone pour notre projet semblait compromis. Par chance, nous sommes tombé sur une série de discussion sur internet présentant et interprétant des captures réalisés sur le même modèle de drone. Voilà un bref résumé de ce que nous avons appris.
NB: Pour réaliser l’enregistrement, l’outil interceptty a été utilisé.
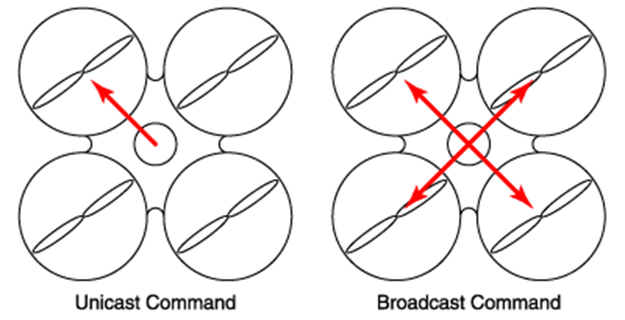
Le moteur peut recevoir deux grands types de commandes : des commandes unicast (à destination d’un moteur) et multicast (à destination de tous les moteurs). Les commandes unicast servent à configurer le programme du contrôleur de chaque moteur, tandis que les commandes multicast permettent de paramétrer la vitesse d’un moteur.
commande unicast
L’ensemble des commandes unicast est décrite dans le tableau ci-dessous:
| Nom de la commande | Valeur | Description | Valeur de retour |
| Récupérer le statut du moteur | E0 | Récupère le statut du moteur | 00 : ok 50 : besoin de flash la mémoire |
| Ecrire dans la mémoire du contrôleur du moteur | 71 XX…XX 70 | Ecris dans la mémoire le programme du moteur. Le programme doit faire 64 octets, représenté par les XX…XX dans la commande | 00 |
| Récupérer le checksum de la mémoire | 91 | Demande de récupérer le checksum du moteur. | 120 octets, correspondant au checksum de la mémoire |
| Fixer le statut comme étant ok | A1 | Fixe le statut du moteur comme étant ok. | A0 FF |
| Assigner un moteur comme étant le moteur 1,2,3 ou 4 | 01 ou 02 ou 03 ou 04 | Assigner un moteur comme étant le moteur 1,2,3 ou 4 | 00 |
| Récupérer la version du moteur | 11 | Récupérer la version du moteur sous la forme de 11 octets. Exemple : 01 0b 03 00 01 01 0a 0a 1a 0a 0a = soft version 1.11, hard version 3.0, supplier 1.1, lot number 10/10, FVT1 26/10/10 | 11 octets |
Commande multicast
L’ensemble des commandes multicast est décrite pas le tableau ci-dessous:
| Nom de la commande | Valeur | Description | Valeur de retour |
| Démarrer une communication multicast. | A0 A0 A0 A0 A0 A0 | Démarrer une communication multicast. Tout les échanges qui suivent seront à destination de tous les moteurs. | 00 |
| Fixe la vitesse de rotation des moteurs | 2x xx xx xx xx | 00 | |
| Vérifie si les moteurs sont encore opérationnels | 89 ou 8A ou 8B ou 8C | 89 : moteur 1, 8A : moteur 2, 8B : moteur 3, 8C : moteur 4 | 28 2F |
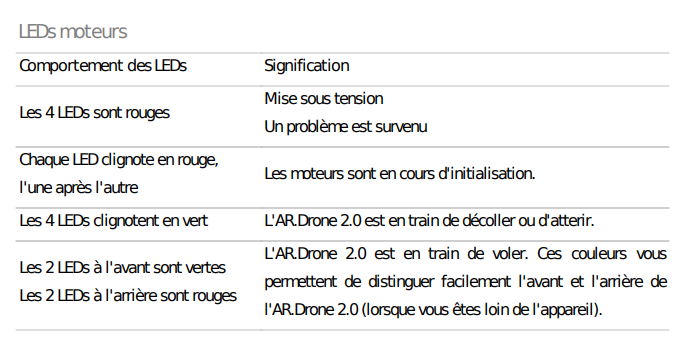
| Fixe la couleur de la LED des moteurs | 6x xx ou 7x xx (commence par les bits 011…) | Bit n°5 à 1 : LED rouge moteur arrière gauche Bit n°6 à 1 : LED verte moteur arrière gauche Bit n°7 à 1 : LED rouge moteur arrière droit Bit n°8 à 1 : LED verte moteur arrière droit Bit n°9 à 1 : LED rouge moteur avant droit Bit n°10 à 1 : LED verte moteur avant droit Bit n°11 à 1 : LED rouge moteur avant gauche Bit n°12 à 1 : LED verte moteur avant gauche C’est à dire de la forme : 011grgrg rgrxxxx (ça aurait changé pour l’ARDRONE 2: 011rrrrx xxxggggx) | 00 |
Spécificité de la liaison série
Comme les deux lignes de communications sont regroupés en une seule ligne (RX+TX), il faut mettre en place un multiplexeur qui connectera la ligne TX+RX du moteur :
- vers la ligne TX de la carte mère lors de la transmission.
- vers la ligne RX de la carte mère lors de la réception.
De cette manière on pourra capturer, et surtout interpréter le retour de chaque chaque commande.
Exemple d’un échange
Exemple d’une capture réalisé par wiredrat disponible ici. Ce qui suit un < est une commande envoyée par la carte mère vers le moteur. Ce qui suit un > est le résultat de la commande envoyé par le moteur vers la carte mère.
< 0xe0 RST?
> 0xe0
> 0x00
< 0x01 MOTOR 1
> 0x01
< 0x40 (@) GET INFO
> 0x40 (@)
> 0x01
> 0x0b
> 0x03
> 0x00
> 0x01
> 0x01
> 0x09
> 0x0a
> 0x07
> 0x0a
> 0x0a
Pour la suite
Nous avons maintenant une première idée du fonctionnement du protocole de communication BLC. Seulement, comme les sources sont relativement anciennes et que nous n’avons aucune preuve de leur véracité, j’ai décidé de réalisé le reverse engineering du firmware du drone, disponible sur internet. Je vous explique tout ici.